ROBORACER GRAND PRIX 규정
수정일자: 2026-06-13
Table of content
- 1. 개요
- 2. 대회 일반
- 3. 경고 및 패널티
1. 개요
국제 ROBORACER 자율주행 레이싱 대회는 모든 수준의 팀에게 열려있는 경주 대회입니다. 참가팀은 임의의 수의 구성원으로 이루어질 수 있으나, 각 참가자는 오직 한 팀의 구성원이어야 합니다.
이 대회는 2026년 8월 24일(월)부터 8월 27일(목)까지 부산 BEXCO에서 개최되는 IFAC 2026에서 대면 경쟁으로 진행됩니다.
ROBORACER GRAND PRIX 일정: 2026년 8월 24일(월) ~ 27일(목)
팀은 공식 웹사이트를 통해 대회에 등록할 수 있습니다.
2. 대회 일반
- 대회는 5단계로 구성됩니다:
- 0단계: 팀의 자율주행 관련 기술 자료 제출
- 1단계: 등록 및 검사
- 2단계: 맵핑 및 연습 세션 (맵핑, 공식 연습, 자유 연습)
- 3단계: 예선 (미션 수행, 타임 트라이얼)
- 4단계: 일대일 경주
-
대면 경쟁에 등록한 팀들은 아래에 나열된 제약 사항에 따라 직접 차량을 제공하고 제작해야 합니다. 또한, 각 팀은 고유한 차량을 가져야 합니다 (즉, 한 연구실이 하나의 차량으로 여러 팀을 참가시킬 수 없습니다).
- 향후 ROBORACER 대회의 품질을 향상시키기 위해, 각 경주의 우승자는 자신의 알고리즘 코드를 Github의 ROBORACER Autonomous Racing Community repository에 오픈소스 라이선스로 공개하는 것이 권장됩니다.
2.0 기술 자료 제출
-
팀들은 대회 전 등록 절차에서 자신의 차에 대한 기술 자료를 제출해야 합니다.
-
특정 형식은 요구되지 않습니다.
-
제출물은 팀의 자율주행 차량에 대한 소프트웨어, 하드웨어 기술을 요약한 내용을 포함하여야 합니다.
-
마감일을 지켜주시기 바랍니다.
2.1 차량 클래스
차량 클래스는 다음 제약 사항을 충족하는 차량만 허용합니다:
- 차량은 ROBORACER 지침에 따라 제작되어야 하지만, 규정을 준수하는 한 대체 부품이 허용될 수 있습니다. 불분명하거나 모호한 사항은 경주 주최자와 사전에 확인해야 합니다.
- 각 차량은 기준을 충족하는지 예선의 일부로 검사됩니다. 기준을 충족하지 않을 경우, 차량은 참가할 수 없습니다.
- ROBORACER 대회는 알고리즘 경쟁입니다. 유리하게 만들 수 있는 하드웨어는 허용되지 않습니다.
- 섀시: 경기는 1:10 Traxxas 섀시(예: TRA74054, TRA6804R)를 기준으로 설계되었습니다. 이러한 섀시가 권장되지만, 일반적으로 Traxxas 차량 치수의 15% 이내인 섀시는 허용됩니다 (238mm ≤ 폭 ≤ 341mm, 454mm ≤ 길이 ≤ 654mm). 4WD와 2WD 모두 허용됩니다.
- 타이어: 제한 없음 (스폰지와 고무 모두 허용). 그러나 화학 첨가제는 엄격히 금지됩니다.
- 메인 컴퓨팅 유닛: 사양에 제한 없음. 한개의 컴퓨팅 유닛만 사용 가능합니다.
- 라이다: 사양에 제한 없음. 한개의 라이다 센서만 사용 가능합니다. 3D LiDAR 도 허용됩니다.
- 카메라: 단일 카메라(예: Logitech C270, Logitech C920, Raspberry Pi Camera Module V2, Arducam)와 스테레오 카메라(예: Intel Realsense, ZED) 모두 허용됩니다. 검출이나 VIO 결과 등의 추가 정보를 카메라 내부 처리에서 제공하는 카메라는 허용되지 않습니다. (깊이 정보는 허용됨)
- 모터: 사양에 제한 없음. 파워트레인에는 단일 모터만 사용할 수 있습니다.
- 배터리: 4S LiPo 배터리 또는 3S 이하. 배터리 갯수에는 제한이 없으며, 총 셀 수가 4S를 초과하지 않으면 됩니다 (예: 2S + 2S 허용).
- 감지 박스: 차량은 상대방의 라이다에 의해 쉽게 감지되어야 합니다. 따라서 차량은 지면에서 10~30cm 사이의 모든 수평면에서 최소 12×12cm 크기의 공간을 차지해야 합니다.
- 폼 범퍼: 범퍼는 손상을 최소화하기 위해 부드러워야 합니다. 트랙에 두 대 이상의 차량이 있을 경우 이 두 구성 요소(감지 박스 및 폼 범퍼)를 부착해야 합니다.
- 기타 센서: 기타 센서(IMU, 엔코더, 사용자 정의 전자 속도 컨트롤러)는 허용됩니다. 실내 GPS 센서(예: Marvelmind)는 허용되지 않습니다.
2.2 트랙 및 경주 환경
대회는 부산 BEXCO에서 열립니다. 트랙이 건설될 환경의 특징은 다음과 같습니다:

트랙이 설치되는 BEXCO 제2전시장 3층 Hall 5A 바닥은 경화 콘크리트(Hardened Concrete) 기반에 우레탄 코팅 마감이 되어 있습니다. 이 표면은 일반적인 아스팔트 포장 대비 마찰 계수가 현저히 낮고 표면이 매끄러운 것이 특징입니다.
트랙 크기는 약 8 m × 22 m입니다.
2.3 검사
- 검사의 목적은 차량이 대회 요구사항을 충족하고 환경, 상대방, 사람에게 위험하지 않은지 확인하는 것입니다.
- 차량은 ROBORACER 지침에 따라 제작되어야 하지만, 규정을 준수하는 한 대체 부품이 허용될 수 있습니다.
- 차량 검사는 대회 첫째 날 실시됩니다.
- 검사는 경주 심판이 수행합니다.
- 검사는 연습 전에 완료되어야 하며, 하드웨어 변경 후에는 재검사를 받아야 합니다.
2.3.1 소프트웨어 검사 (Software Inspection)
- 팀은 비상 브레이크를 토글(on/off) 방식으로 작동시킬 수 있음을 시연해야 합니다.
- 토글 방식의 비상 브레이크는 경주 중 개입용으로는 사용할 수 없습니다.
2.3.2 하드웨어 검사 (Hardware Inspection)
- 섀시 크기 (Chassis Dimension): 차량 크기는 2.1절에 명시된 규정을 준수해야 합니다.
- 감지 박스 크기 (Detection Box Dimension): 감지 박스는 지면으로부터 10~30 cm 높이의 수평면에서 최소 12 × 12 cm 공간을 차지해야 합니다.
2.4 맵핑 및 연습
2.4.1 맵핑
- 맵핑은 그룹 세션으로 진행됩니다 — 모든 팀이 동시에 트랙에서 함께 맵핑합니다.
- 그룹 맵핑 세션 중 알고리즘 테스트는 금지됩니다.
- 맵파일이 없는 팀은 주변 팀에게 받는 것은 허용 되지만, 이는 운영진과 무관합니다.
- 이번 대회에서는 트랙에 대한 png, yaml 및 pbstream 파일을 제공합니다.
2.4.2 연습
- 각 팀은 여러대의 차량을 준비할 수 있지만 트랙 위에는 팀 당 한대의 차량만 존재해야 합니다.
- 샘플 장애물을 제공합니다.
- 연습 중에 일어난 사고에 대해서 책임을 묻지 않습니다.
- 하지만 사고가 일어난 팀은 심판 요청 시 알고리즘을 설명해야 할 의무가 있습니다.
2.5 예선 (미션 수행, 타임 트라이얼)
2.5.1 일반
- 연습과 예선 모두 동일한 트랙을 사용합니다.
- 예선의 모든 단계는 8분 내에 이루어져야 합니다.
- 총 참가팀 수에 따라 변경될 수 있습니다.
- 예선은 총 Q1, Q2, Q3로 이루어진 3가지의 미션과 Fully Autonomous라는 1가지의 달성 조건으로 이루어져 있습니다.
- Q1 부터 Q3는 순차적으로 진행되며, 건너 뛸 수 없습니다.
- 예선전의 최종 순위 결정은 다음 기준을 순서로 결정됩니다.
- Fully Autonomous 만족 여부
- 통과한 예선의 수
- 가장 마지막으로 완료한 예선의 기록
- 최종순위 결정의 예시는 다음과 같습니다.
- 총 12팀이 있다고 가정.
- Fully Autonomous 만족 팀 3팀, Q3 통과팀(FA 미달성) 3팀, Q2 실패팀(Q1 통과) 3팀, Q1 실패팀 3팀이라고 가정.
- Fully Autonomous 조건을 만족한 팀 중에서 Q3의 기록 순으로 1위부터 3위까지 배정.
- Q3를 통과한 팀(Fully Autonomous 미달성) 중에서 Q3 기록 순으로 4위부터 6위까지 배정.
- Q2를 실패한 팀 중에서 Q2 부분 완주 바퀴 수 순으로 7위부터 9위까지 배정.
- Q1을 실패한 팀 중에서 Q1 부분 완주 바퀴 수 순으로 10위부터 12위까지 배정.
2.5.1.1 예선 경기 예시
| 순위 | Fully Autonomous | Q3(fastest lap) | Q2(완주바퀴) | Q1(완주바퀴) |
|---|---|---|---|---|
| 1 | O | 10.8 s | 3 | 3 |
| 2 | O | 11.2 s | 3 | 3 |
| 3 | O | 13.0 s | 3 | 3 |
| 4 | X | 9.9 s | 3 | 3 |
| 5 | X | 10.1 s | 3 | 3 |
| 6 | X | 12.2 s | 3 | 3 |
| 7 | X | - | 2 | 3 |
| 8 | X | - | 1 | 3 |
| 9 | X | - | 0 | 3 |
| 10 | X | - | - | 2 |
| 11 | X | - | - | 1 |
| 12 | X | - | - | 0 |
2.5.2 예선 1 (Q1)
- 예선 1은 장애물 없는 트랙(obstacle-free)에서 충돌 없이 3바퀴 완주하는 것을 목표로 합니다.
- Q1 진행 중에는 트랙에 장애물이 배치되지 않습니다.
- 예선 1을 통과하지 못한 차량은 트랙을 충돌없이 몇 바퀴 완주하였는가로 순위가 정해집니다.
- 예선 1을 통과한 차량은 예선 2로 넘어가게 됩니다.
2.5.3 예선 2 (Q2)
- 예선 2는 랜덤 장애물에 대해 충돌 없이 3바퀴 완주하는 것을 목표로 합니다.
- 예선 2의 랜덤 장애물은 심판이 배치하며, 총 2개가 배치됩니다. 장애물의 위치는 사전에 공지되지 않습니다.
- 예선 2를 통과하지 못한 차량은 트랙을 충돌없이 몇 바퀴 완주하였는가로 순위가 정해집니다.
- 예선 2를 통과한 차량은 예선 3로 넘어가게 됩니다.
2.5.4 예선 3 (Q3)
- 예선 3은 2분 동안 장애물이 없는 트랙에서 최소 랩타임을 달성하는 것을 목표로 합니다.
- 2분동안 자유롭게 진행 중 가장 짧은 랩타임을 기준으로 합니다.
2.5.5 Fully Autonomous (달성 조건)
- 달성 조건은 예선이 진행되는 모든 순간에 적용됩니다.
- 달성 조건은 아래와 같습니다.
- 예선의 모든 과정이 진행되는 동안 차량에 직간접적 영향을 끼치지 않은 팀
- 달성 조건의 직간접적 영향은 다음과 같습니다.
- 차량에 손을 대는 행위
- 조이스틱을 조작하는 행위
- 키보드/마우스에 손을 대는 행위
- 컴퓨터를 조작하는 행위
- 완벽한 달성을 위해서 아래와 같은 포즈는 취하면 좋습니다.


2.5.6 정적 장애물
- Q2 과정에서 랜덤하게 배치되는 장애물은 정적 장애물입니다.
- 각 장애물은 0.5m x 0.5m보다 작습니다.
- 장애물의 위치는 Q1 완료 이후 심판이 랜덤하게 배치합니다.
- 장애물은 Q2 완료 이후 제거됩니다.
- 장애물의 제거는 차량이 영향이 받지 않을 때 안전하게 제거됩니다.
2.5.7 기록 무효
- 사람이 개입하여 차량에 영향을 준 경우 랩 타임을 무효화하고 완주 랩 수에서 제외됩니다.
- 정적 장애물에 접촉이 있는 경우 랩 타임을 무효화하고 완주 랩 수에서 제외됩니다.
- 트랙에 접촉을 했지만 사람의 개입이 없이 주행이 가능하다면 사소한 접촉으로 간주하고 기록은 유효합니다.
2.5.8 주의 사항
- 예선 도중 차량을 임의의 위치(예: 시작선)로 가져가는 것은 엄격히 금지됩니다.
- 차량이 어떤 이유로든 트랙에 뺐다가 다시 넣는 경우에는, 차량의 방향은 약간 조정할 수 있지만 나갔던 위치에 다시 배치해야 합니다.
- 트랙에 접촉이 있다면, 기록이 무효화가 되지 않더라도 즉시 트랙을 원래의 위치로 돌려놓아야 합니다.
- 장애물에 접촉이 있다면 즉시 원래의 위치로 돌려놓아야 합니다.
- 모든 연산은 차량 내부에서 수행되어야 합니다!!
- 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크는 엄격히 금지 됩니다
2.6 일대일 경주
2.6.0 토너먼트 방식
- 일대일 경주는 더블 엘리미네이션(Double Elimination) 방식으로 진행됩니다.
- 각 팀은 두 번 패배 후 탈락합니다.
- Day 3 (8월 26일): Winners Bracket — 이 날은 탈락 팀이 없습니다.
- Day 4 (8월 27일): Losers Bracket 경기 시작. Winners Bracket에서 탈락한 팀들이 Losers Bracket에 편입됩니다.
- 최종 우승자는 브래킷을 통해 결정됩니다.
2.6.1 일반
- 두 차량은 반대 방향에 위치한 서로 다른 출발선에서 시작합니다.
- 총 3 개의 정적 장애물이 사용됩니다. 모든 팀이 경주 준비를 완료한 후 참가 팀이 각각 한 개의 장애물을 설치하며, 심판이 다른 하나의 장애물을 설치합니다.
- 트랙의 정적 장애물은 경주 시작 선두 차량이 10랩은 완주하였을 때 제거됩니다.
- 각 차량은 시간 제한 내에 장애물과 상대방을 피하면서 20랩을 먼저 완주해야 합니다.
2.6.2 목표
- 먼저 20바퀴를 완주하기. 8강 이전 경기는 10바퀴로 수정이 될 수 있습니다.
2.6.3 무작위 정적 장애물
- 총 3개의 정적 장애물이 무작위로 배치됩니다.
- 참가 팀, 심판이 각각 한 개의 정적 장애물을 배치합니다.
- 각 장애물은 0.5m x 0.5m보다 작습니다.
- 장애물의 위치는 두 차량이 출발선에서 모두 준비를 마친 후 놓여집니다.
- 장애물이 놓여진 후 출발 신호 만이 차량에 전달이 될 수 있습니다.
- 장애물은 레이스 중간에 제거됩니다.
- 장애물의 제거는 두 차량 모두 영향이 받지 않을 때 안전하게 제거됩니다.
2.6.4 충돌
- 트랙 경계 및 정적 장애물
- 트랙과 장애물을 복구합니다
- 경주가 계속될 수 있다면 중단 없이 계속해야 합니다.
- 차량 대 차량
- 심판의 정지 신호 없이 팀 재량으로 경주를 중단하지 마십시오!!
- 충돌 상황에서 가해차량이 명확하지만 추월하지 못한 상황에서는 경기는 그대로 진행합니다.
- 충돌 상황에서 피해차량이 명확하고 피해차량이 주행 불가능하거나 충돌이 심각하거나 추월 당하는 경우 경기는 중단됩니다.
2.6.5 주의 사항
- 심판의 정지 신호 없이 팀 재량으로 경주를 중단하지 마십시오!!
- 모든 연산은 차량 내부에서 수행되어야 합니다!!
- 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크는 엄격히 금지 됩니다
- 감지 박스가 규정을 위반한 차량은 레이스에 참가하지 못합니다.
- 나란히 달리면서 생기는 접촉 및 사고에서는 명확한 가해자가 없으면 레이스를 중지시키지 않습니다.
2.7 공통 주의 사항(중요!!)
- 충돌로 인해 주행이 어렵거나 위험한 경우 즉시 차량을 비상정지 시켜야 합니다.
- 모든 연산은 차량 내부에서 수행되어야 합니다!!
- 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크는 엄격히 금지 됩니다
- 각 팀은 여러대의 차량을 준비할 수 있지만 트랙 위에 같은 팀 소속의 차량이 2대 이상 나올 수 있는 경우는 맵핑 시간 뿐입니다.
- 한 차량을 여러 팀에서 공유하는 것은 엄격히 금지 됩니다.
- 트랙 내에 2대 이상의 차가 존재할 수 있는 경우라면 detection 박스는 필수로 부착하여야 합니다.(ex. 맵핑 또는 예선에서는 부착하지 않아도 됨.)
- Wi-Fi에 관한 이의신청은 받지 않습니다. 자율주행 시스템이 Wi-Fi 상황과 무관하게 독립적으로 작동하도록 설계되었는지 확인하시기 바랍니다. 경주에 참가하지 않는 팀의 Wi-Fi를 꺼달라고 안내는 하겠지만, 이는 순전히 팀의 시각화와 디버깅을 용이하게 하기 위한 것이지 알고리즘 성능을 위한 것이 아닙니다!
- 트랙 내에서의 모든 하드웨어 수리 및 정비(고장난 부품 수리, 센서 재보정, 배터리 교체 등)는 금지됩니다.
- 맵핑, 공식 연습 및 예선의 전용 시간은 참가팀 수에 따라 달라질 수 있습니다.
- 맵핑 및 공식 연습 세션의 전용 시간은 선착순 기준으로 지정되며, 등록 및 검사를 성공적으로 완료한 팀만 자격을 갖습니다.
- 사람이 트랙 위에 있는 것은 금지 됩니다.(Mapping 시간 제외)
- 경주 중 조이스틱 사용이나 조이스틱 누르기를 허용하지 않습니다.
- 자율주행 <-> 인간 제어 전환을 위한 모듈을 “누르고 유지” 방식에서 “on/off” 토글 방식으로 변경하시기 바랍니다.
- 시각화(예: RViz) 또는 디버깅 목적으로 한 대의 랩톱만 연결할 수 있습니다.
- 앞의 장애물(상대차량 또는 정적장애물)에 너무 가까이 붙어 정지해 있어 회피 기동이 불가능하여, 공간이 필요한 경우 심판에게 요청하면 뒤로 조금 옮길 수 있습니다.
3. 경고 및 패널티
- 사건에 대한 판정은 현장 심판의 재량에 따르며 이를 존중해야 합니다.
- 여러 위반이 포함된 사건이라도 사건당 하나의 페널티만 적용됩니다
3.1 예선
3.1.1 순위 한단계 강등
- 경주 중에 키보드, 마우스를 사용한 경우
- 데이터 전송이 일어나지 않더라도, 키보드 마우스 사용 금지
- 예외1: 차량이 트랙 위에 없는 경우
- 예외3: re-localization을 위한 initial guess 를 전송하는 경우
- 매뉴얼 조작(joystick, keyboard 또는 다른 장치)로 본인 차량에 간섭한 경우
- 예외1: 심판이 레이스 중지를 선언하여 비상 정지가 필요한 경우
- 예외2: 출발, 재출발에서 출발신호를 전달하는 경우
- 예외3: 충돌로 인한 주행 불가 상태인 경우 비상정지가 필요한 경우
- 예외5: 장애물에 5초이상 갇혀서 비상정지가 필요한 경우
- 예외6: 이상 주행(급발진, 역주행 등)을 막기 위한 비상정지가 필요한 경우
- 예외7: 상대 차량이 트랙을 심각하게 손상해서 주행이 불가능하여 심판이 매뉴얼로 조작하는 것을 허용한 경우
- 예외8: 예선 종료 이후 정지하는 경우
- 레이스 도중 장애물의 위치에 따라 수정된 경로를 사람이 직접 생성하거나 고르는 경우
3.2 일대일 경주
3.2.1 실격
- 경주 진행 중, 추가 1바퀴가 누적되어 총 3바퀴가 추가 되었을 경우 자동으로 실격처리 됩니다.
3.2.2 추가 1바퀴
- 3회 경고가 누적 된 경우
- 경주 중 상대방 차량에 대한 사람의 치명적인 방해
- 트랙을 고치러 가다가 상대방 차량에 물리적인 접촉으로 주행에 영향을 주는 경우
- 명확한 가해차량과 피해차량이 존재하고, 피해차량이 주행 불능 상태가 된 경우
- 완전한 후방 충돌에서 큰 충격을 동반한 사고
- 완전한 후방 충돌이 아니더라도 큰 충격을 동반한 사고
- 경주 중에 키보드, 마우스를 사용한 경우
- 데이터 전송이 일어나지 않더라도, 키보드 마우스 사용 금지
- 예외1: 차량이 트랙 위에 없는 경우
- 예외3: 트랙에서 나갔다가, 다시 트랙에 넣고 re-localization을 위한 initial guess 를 전송하는 경우
- 매뉴얼 조작(joystick, keyboard 또는 다른 장치)로 본인 차량에 간섭한 경우
- 예외1: 심판이 레이스 중지를 선언하여 비상 정지가 필요한 경우
- 예외2: 출발, 재출발, 종료 이후
- 예외3: 충돌로 인한 주행 불가 상태인 경우
- 예외5: 장애물에 5초이상 갇혀서 매뉴얼 조작으로 변경을 위한 정지를 위한 경우
- 예외6: 이상 주행(급발진, 역주행 등)을 막기 위한 비상정지를 하는 경우
- 레이스 도중 장애물의 위치에 따라 수정된 경로를 사람이 직접 생성하거나 고르는 경우
3.2.3 경고 1회
- 부정출발
- 트랙 복구를 적극적으로 하지 않은 경우
- 레이스 도중 감지 박스의 고정이 제대로 되지 않는 경우
- 매 바퀴마다 제대로 수정하지 않을 시 새로운 경고 부여 가능
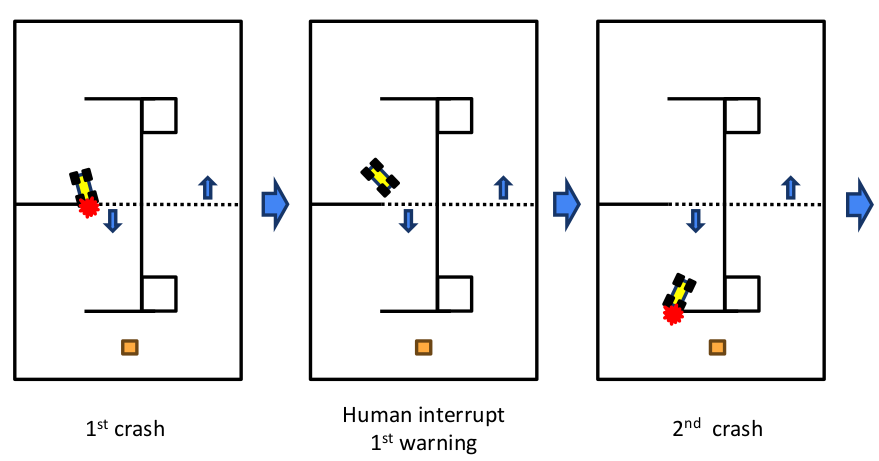
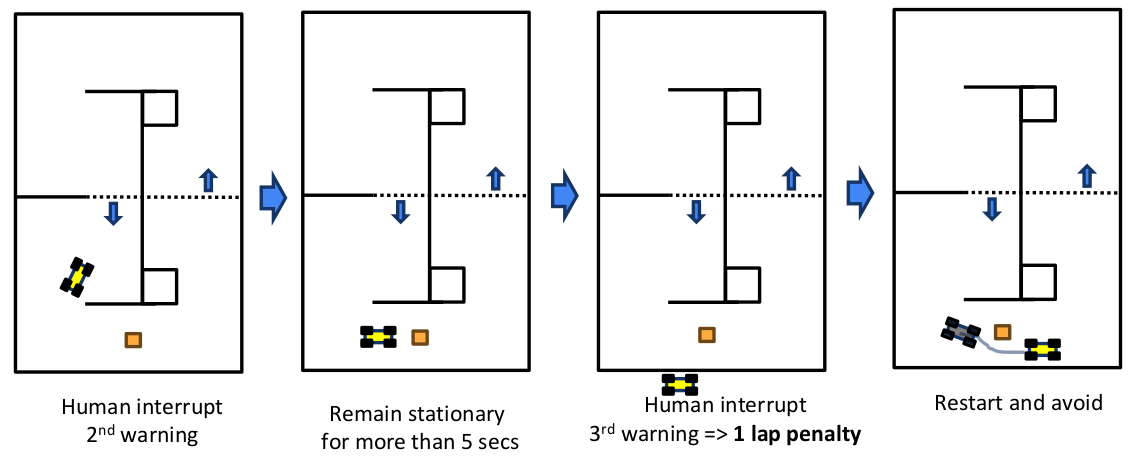
- 경주 중 자신의 차량에 대한 개입
- 충돌 이후 차량을 트랙 바깥으로 빼는 행위
- 차량의 헤딩을 직접 수정하는 경우
- 경주 중 상대방 차량에 대한 사람의 방해
- 트랙을 고치러 가다가 상대방 차량의 detection 모듈에 감지되어서 주행에 영향을 주는 경우
3.2.4 예시 사례